Cruise Control Example¶
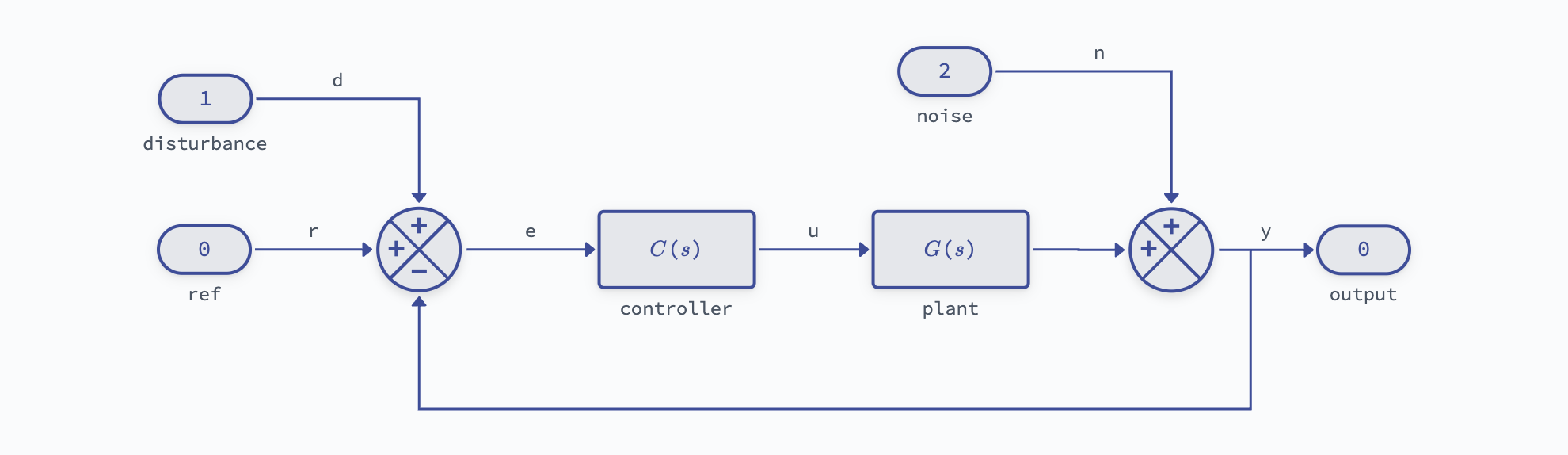
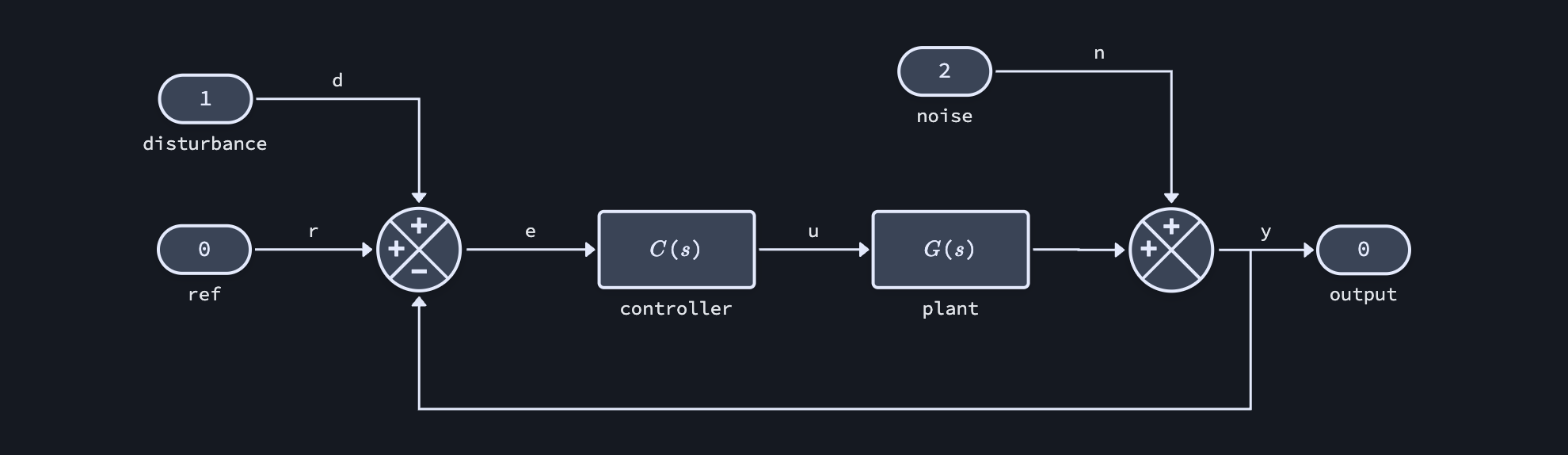
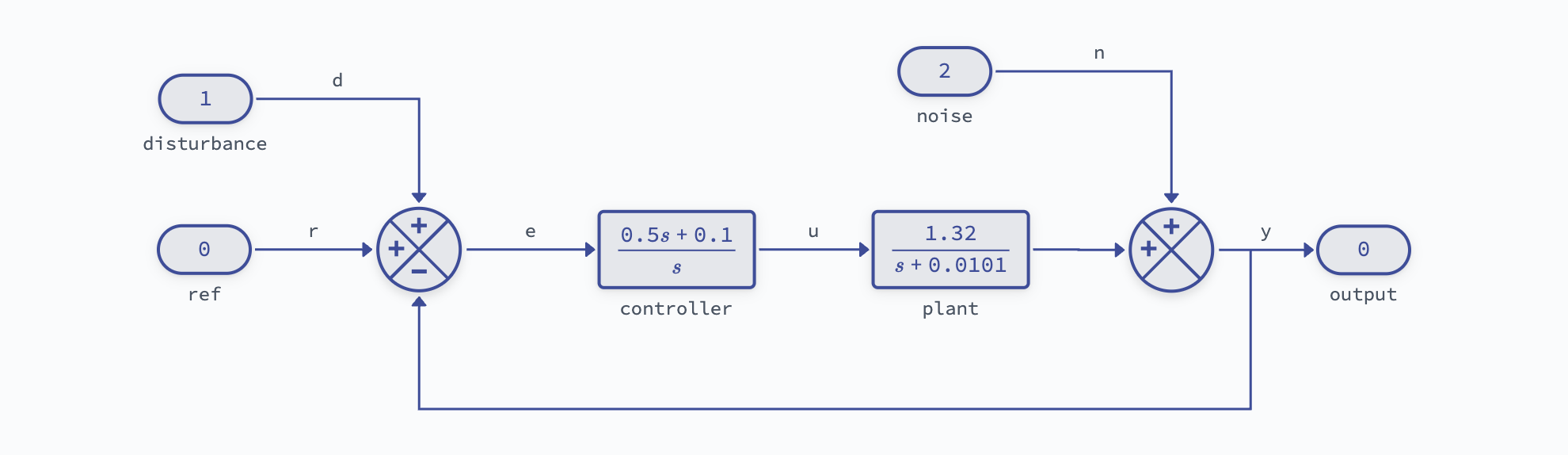
This example demonstrates a simple feedback control system with a proportional-integral controller and first-order plant. It is borrowed from the “cruise control” example in Åström & Murray, Chapter 3.
System Overview¶
The plant models a transfer function from engine throttle to speed and is derived from linearizing a 1D nonlinear model about a particular engine gear and vehicle speed.
The linearized plant model is:
and this can be controlled with simple proportional-integral (PI) feedback:
Setup¶
Create Diagram¶
It is possible to create this diagram programmatically using the block diagram API; however, you can expect a generally poor experience programmatically constructing block diagrams.
Instead, either use the interactive widget to construct the diagram yourself, or load one of the pre-built templates and modify the block parameters.
For a simple feedback controller with a transfer function plant model we can load the "feedback_tf" template:
# Construct a new diagram from scratch:
# diagram = lynx.Diagram()
# lynx.edit(diagram)
# Load the diagram architecture from a template
diagram = lynx.Diagram.from_template("feedback_tf")
Update the transfer functions and turn off custom LaTeX rendering to see the numerical values:
# Linearized vehicle model
b = 1.32
a = -0.0101
diagram["plant"].set_parameter("num", [b])
diagram["plant"].set_parameter("den", [1, -a])
diagram["plant"].custom_latex = None
# PI controller
kp = 0.5
ki = 0.1
diagram["controller"].set_parameter("num", [kp, ki])
diagram["controller"].set_parameter("den", [1, 0])
diagram["controller"].custom_latex = None
Export to Python-Control¶
Extract the closed-loop transfer functions from r to u and y as a python-control TransferFunction object:
# Export closed-loop transfer functions
G_yr = diagram.get_tf('r', 'y')
G_ur = diagram.get_tf('r', 'u')
print(f"Closed-loop transfer function:")
print(G_yr)
Closed-loop transfer function:
<TransferFunction>: sys[4]$indexed$converted
Inputs (1): ['ref']
Outputs (1): ['sum_1769105068595']
0.66 s + 0.132
----------------------
s^2 + 0.6701 s + 0.132
Then these subsystems can be further analyzed using any of the python-control tools.
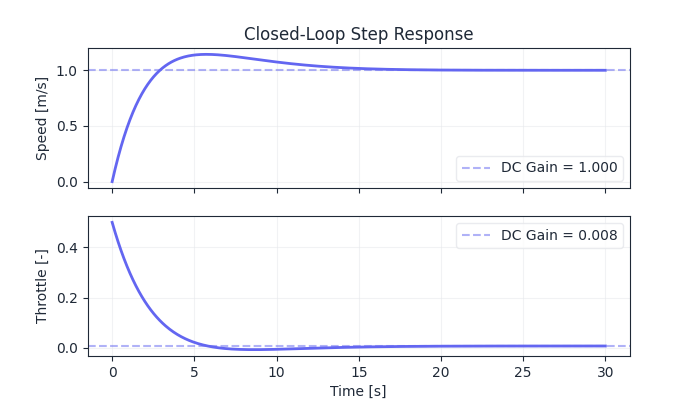
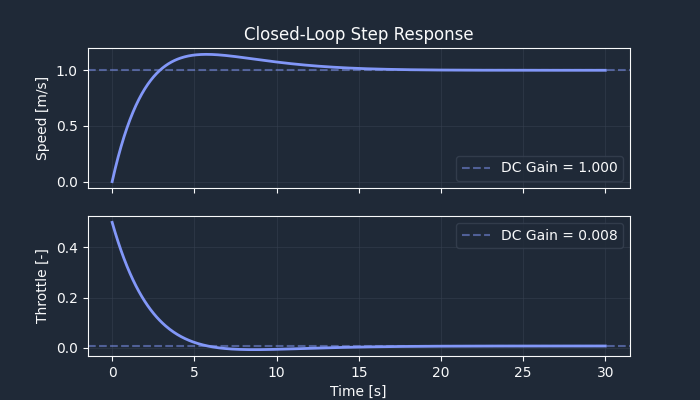
For instance, to evaluate the step response:
# DC gains
yr_dcgain = control.dcgain(G_yr)
ur_dcgain = control.dcgain(G_ur)
# Compute step responses
t = np.linspace(0, 30, 500)
_, y = control.step_response(G_yr, t)
_, u = control.step_response(G_ur, t)